ps.bottom_dd()
- 概要
-
底面反射型フォトセンサー (SN4) の現在の検知状態を取得します。外乱検出を行います。
外乱検出について
太陽光や非常に強い光源 (蛍光灯、電球など) が反射型フォトセンサーの受光部に当たると誤検知します。この状態を検出した場合は、特殊な戻り値であるNoneを返します。
当センサーは赤外線 (目に見えない光) を送信しその反射を検知します。太陽光など赤外線を多く含む光が当たると妨害され正しく検知できません。使用環境にご注意ください。Blockly モードで外乱検出を行うには
- 下記のセンサー読み取りブロックを使用時、「外乱検知」にチェックを入れます。
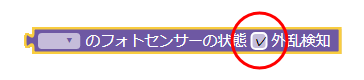
反射面の材質によりますが、感度調整によりセンサーの正面 最大5cm先の障害物を検知できます。
感度はVR4で調整できます。時計回しで感度大 (長い距離を検知)、反時計回しで感度小になります。 - 下記のセンサー読み取りブロックを使用時、「外乱検知」にチェックを入れます。
- 引数
- なし
- 戻り値
-
boolまたはNoneFalse: 物体を検知していない場合True: 物体を検知している場合None: 外乱光を受けている場合